A SCAVENGER HUNT GAME FOR LLM AGENTS
A benchmark to evaluate spatial reasoning and navigational capabilities of LLM agents via a scavenger hunt game. (Final project for CS194/294, UC Berkeley)
SPATIAL PERCEPTION AND REASONING BENCHMARK (SPARK): A SCAVENGER HUNT GAME FOR LLM AGENTS
🔥 This project is the winner of LLM Agents, 3rd place in Benchmark Track. Take a look at our project below.
| Paper | Extended Abstract | Video | Slides |
Abstract
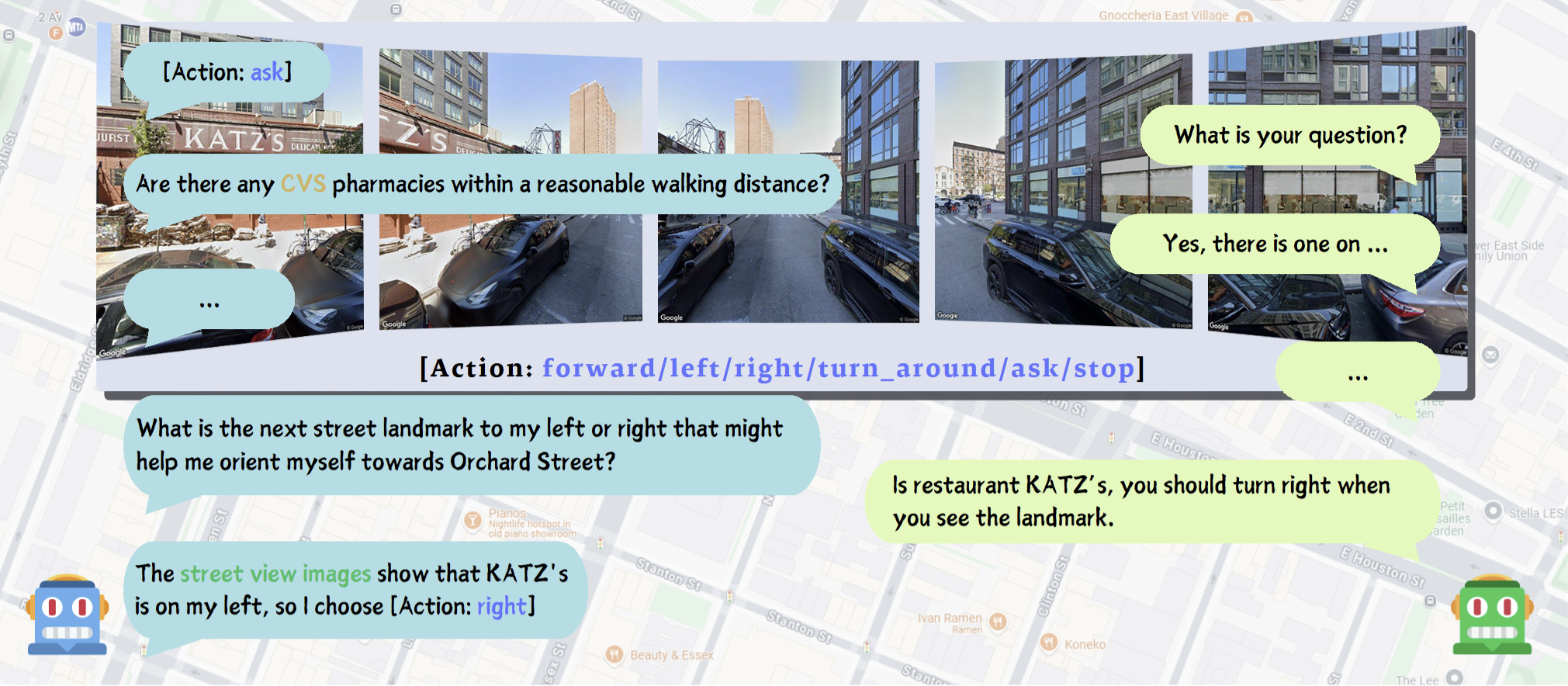
We propose a novel open-source testing framework and benchmark in the field of Vision-Language Navigation (VLN) to evaluate the goal-seeking capabilities of Large Language Model (LLM) agents in real-world environments. To this end, we designed a QA agent that operates without relying on human supervision or data annotations, serving as a semantic heuristic function to provide navigational cues to the agent under evaluation. Additionally, we leveraged techniques such as Reinforcement Learning with AI Feedback (RLAIF) to develop new metrics for detailed analysis of the agent’s progressive information acquisition, multimodal cross-inference, and spatial reasoning abilities. Experimental results demonstrate significant room for improvement in current LLM agents across these dimensions. Future work may explore enhancing LLMs’ visual perception capabilities and their alignment of spatial information with semantic understanding.
How-To Run?
Environment Setup
You can verify your environment by running the setup check script:
Command:
python check_setup.py
This will confirm that the required libraries and API keys are configured properly.
Dataset Setup
The dataset is consisted of two parts: map and task.
Map Setup
We follow previous works and used the touchdown version dataset to express the map.
The dataset is consisted of nodes.txt and links.txt.
These files will describe the graph as $(V, E)$ where $V$ are vertices and $E$ are edges.
# Example nodes.txt
<panoid>,<heading>,<latitude>,<longtitude>
# Example links.txt
<panoid_1>,<heading_direction>,<panoid_2>
You should have your dataset path written in config/map/<your_map_selection>.json. It looks like:
{
"node": "dataset/nodes.txt",
"link": "dataset/links.txt"
}
Task Setup
Task is also a part of our dataset. This is mainly written in config/task, where it defines a lot of scavenger hunt targets for LLM to be tested on. Each task consists of starting_panoids, start_heading, target_infos and arrival_threshold.
Tasks are usually generated on different levels: easy, medium and hard. They mainly differ in path length, number of corners, and how obvious the target is.
Run Experiments
Run Single Experiment
All the config files can be found in config/. An example is provided in main.sh.
Command:
python navigator.py --help/-h
Command:
python navigator.py --navi=<your_navi_config>.json \
--map=<touchdown_format_map>.json \
--eval=<evaluator_config>.json \
--task=<your_task>.json \
--vision=<vision_input_mode_for_agents>.json \
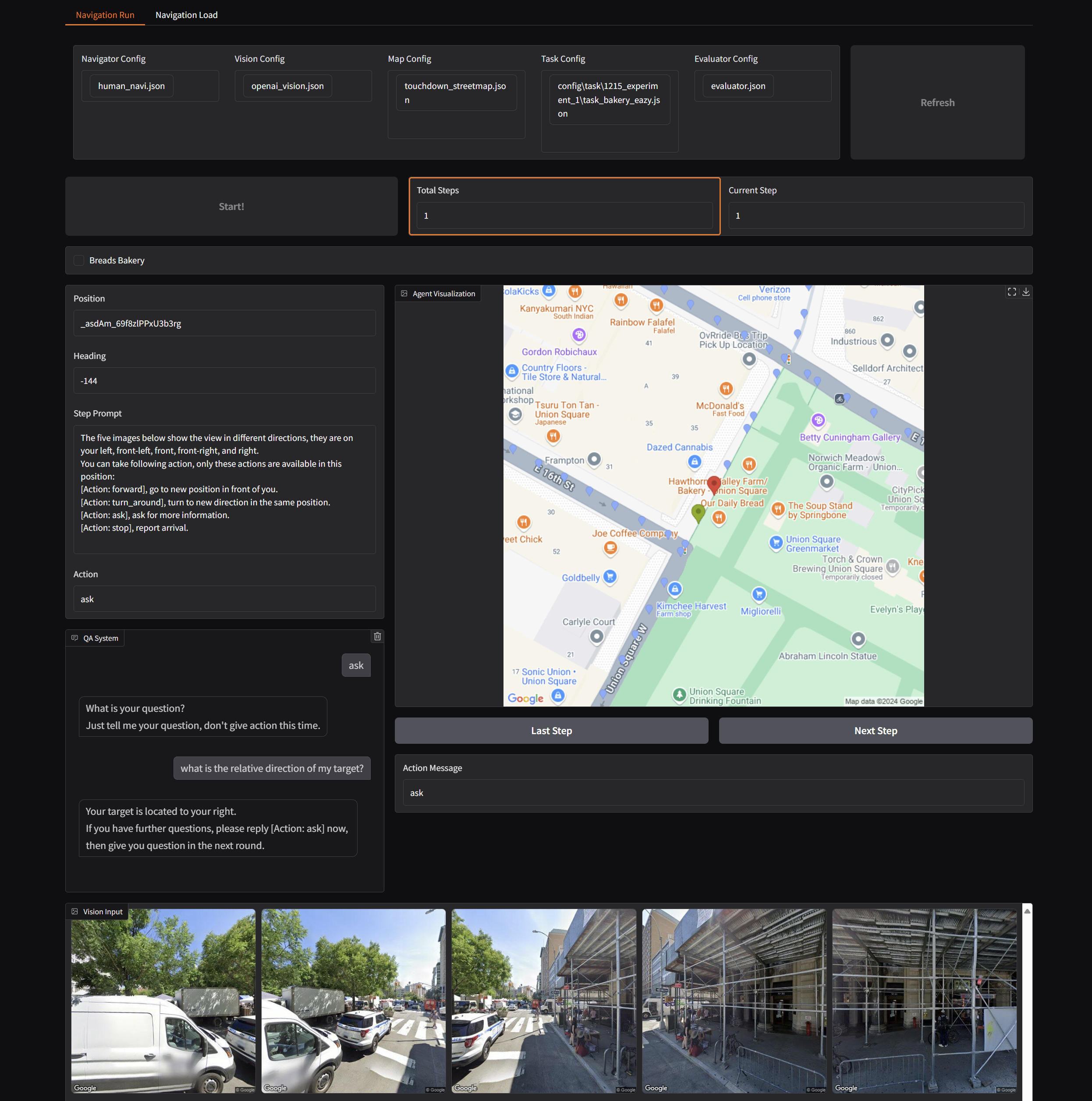
Run Single Experiment (With web visualization)
You can run the following python file.
Command:
python run_single_vis.py
And you will see a web visualization of the testing process.
Run Batch Experiments
run_batch.py is a version where you can define your task queue and run them all.
Command:
python run_batch.py
Run Evaluation
Change the log_folder and task_folder in the evaluator.py to your version.
This script will automatically find all .json logs, evaluate them and aggregate the results.
Command:
python evaluator.py